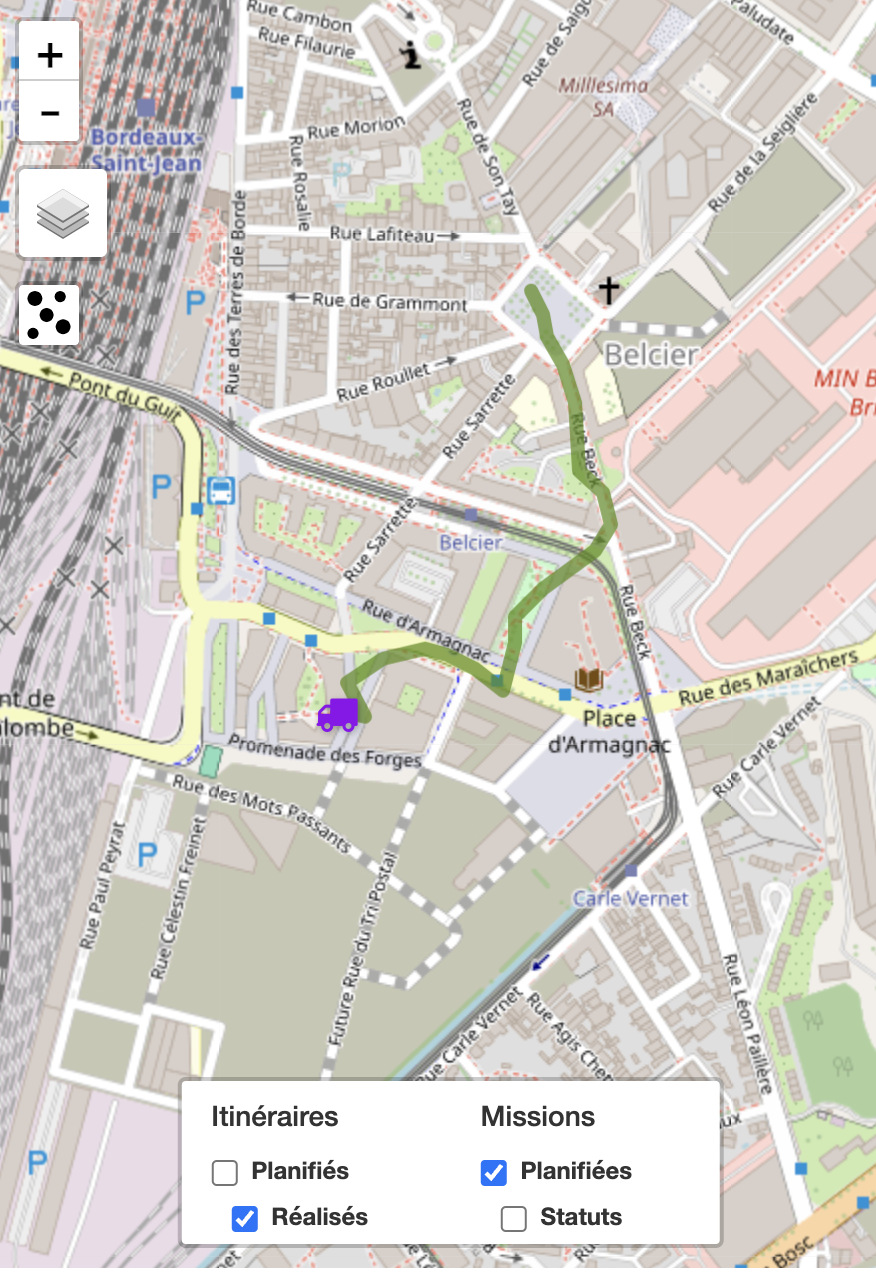
Trazado de las misiones realizadas
El planificador o responsable del usuario puede visualizar desde el cuadro de mando de seguimiento de Mapo Planner, la realización real a lo largo de las misiones de este último.
Existen varias condiciones para la visualización:
- La opción de "Trazado realizado" está activada en la cuenta utilizada por el usuario,
- El trazado se establece:
- Si toda la geolocalización está activada en la aplicación móvil
- Permiso para usar la ubicación
- Permiso para uso en segundo plano
- Permiso para ubicación precisa
- Cuando el usuario inicia sesión en Mapo Driver
- Si toda la geolocalización está activada en la aplicación móvil
- El trazado se detiene cuando el usuario cierra sesión en Mapo Driver
Mass pick up & Mass delivery
La solución de mass pick up se ha desarrollado para responder a los problemas de tiempo invertido, recogida unitaria, baja eficiencia en la carga y, finalmente, la falta de control durante la carga y entre la carga y la entrega.
Configuración
El Mass Pick up es una solución que no está presente por defecto en Mapo Driver y que se puede activar bajo demanda.
Esta puede activarse solo para la carga de la ruta, o bien para la carga y las entregas.
Socio de escaneo
Como complemento y para agilizar la acción de escanear códigos de barras, Woop ha integrado la solución de un socio en la aplicación móvil, acelerando la identificación de los códigos de barras:
- posibilidad de escanear a distancia,
- mayor rapidez en la identificación del paquete,
- posibilidad de escanear en lugares con poca luz
- y muchas otras ventajas.
La integración de este socio se ha realizado según dos opciones:
- la primera consiste en un escaneo de alto rendimiento, adaptado para la carga y la entrega rápidas;
- y la segunda consiste en un escaneo con IA y realidad aumentada, adaptado para identificar en el maletero del camión los paquetes relacionados con la carga de una misión y una entrega
Descripción
1. Principio general del Mass Pickup
El Mass Pickup permite al conductor escanear todos los paquetes de su ruta en una sola sesión de carga.
Cada escaneo vincula automáticamente un paquete a una misión de la ruta y actualiza su estado.
Existen dos modos de inicio posibles.
2. Inicio del Mass Pickup
Opción 1 – Escaneo inmediato (modo rápido)
Desde la ruta, al hacer clic en la acción Mass Pickup:
La aplicación abre automáticamente la cámara en modo escaneo de código de barras.
El objetivo es evitar cualquier fricción y pérdida de tiempo.
Este modo se utiliza cuando el proceso no requiere validación previa.
Opción 2 – POD antes del escaneo
Es posible configurar la aplicación para exigir un POD antes del escaneo.
POD = prueba de operación.
Puede incluir:
Firma
Foto
Formulario
Comentario
En este caso:
El conductor valida el POD.
Una vez completado el POD, se abre automáticamente el escaneo de código de barras.
La carga puede comenzar.
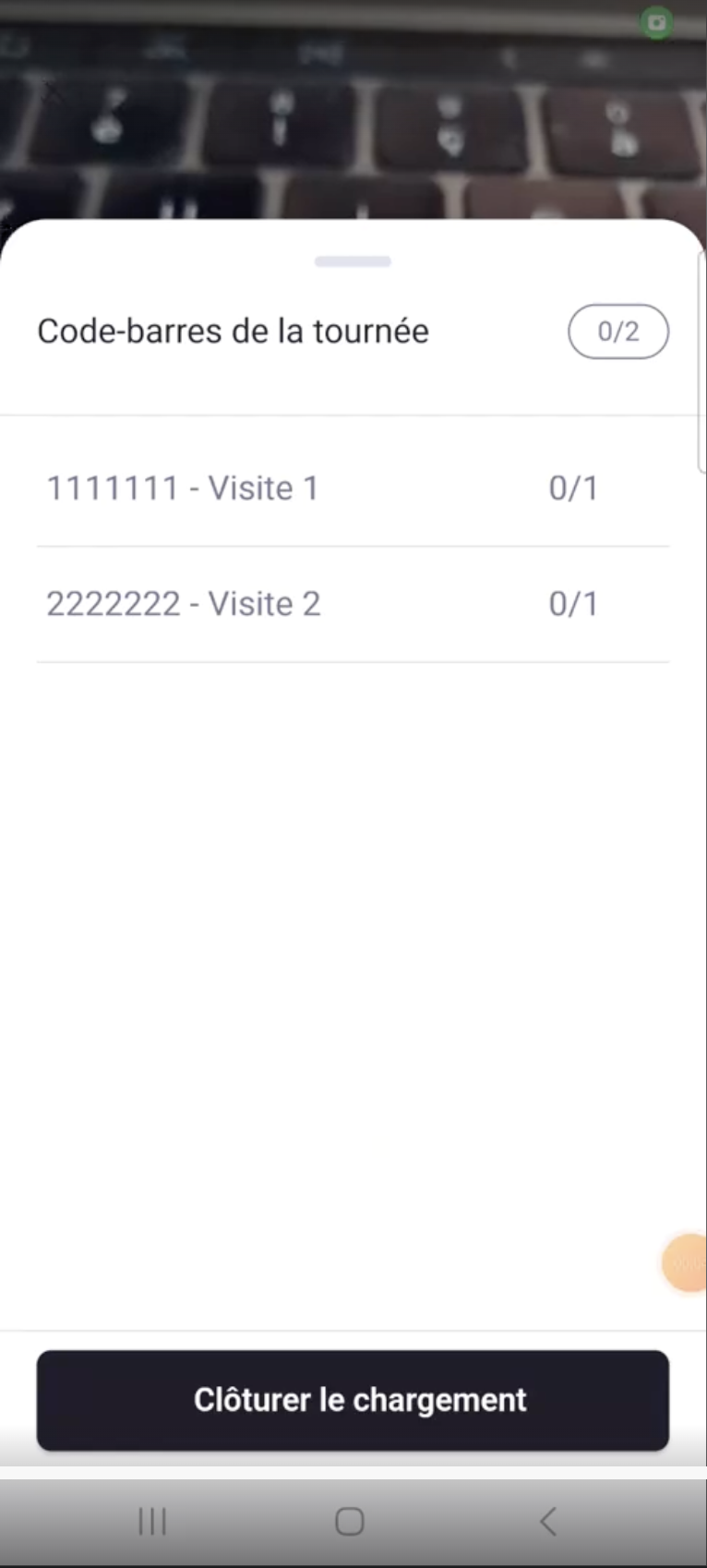
3. Pantalla de escaneo – Mass Pickup
Cuando la cámara está activa:
El usuario visualiza todos los códigos de barras esperados para su ruta.
Cada código de barras corresponde a una entrega (una misión).
Comportamiento al escanear
Cuando se escanea un código de barras:
El sistema lo identifica.
Se asocia automáticamente a la misión correspondiente.
La misión se marca como escaneada en la carga.
No es necesaria ninguna acción manual para actualizar el estado.
4. Cierre de la carga
Cuando el conductor termina de escanear:
Cierra la sesión de carga.
Todas las misiones escaneadas cambian automáticamente de estado.
Ejemplo:
"Por hacer" → "Cargado"
La actualización es automática y sistemática.
5. Reapertura del escaneo tras el cierre
Es posible que:
Lleguen nuevos paquetes después del cierre.
Se haya olvidado un paquete.
El conductor haya terminado la carga demasiado pronto.
En este caso:
El conductor puede volver al módulo de escaneo.
Puede escanear los nuevos paquetes.
Las misiones correspondientes se actualizarán automáticamente.
El sistema permite así la reapertura del Mass Pickup.
6. Gestión de paquetes no escaneados en la carga
Si un paquete no puede ser escaneado:
El conductor puede:
Revisar nuevamente el paquete (error de lectura, etiqueta dañada, etc.)
Reportar el paquete faltante a su responsable
El reporte permite un tratamiento desde el back-office.
7. Sincronización de nuevos paquetes
Importante:
Los nuevos paquetes asignados al conductor no se cargan automáticamente en la pantalla de escaneo.
Si se añade un paquete antes, durante o después del escaneo, el conductor debe volver a la página “Lista de ruta”. Es en ese lugar donde la aplicación recupera las nuevas misiones desde las herramientas de back-office. Sin volver a la lista, los nuevos paquetes no serán visibles.
8. Mass Delivery – Entrega grupal
El Mass Delivery sigue el mismo principio que el Mass Pickup, pero aplicado a la entrega al cliente.
8.1 Acceso a un destino
Si varios paquetes pertenecen a un mismo destino:
El conductor hace clic en el destino.
La aplicación muestra todos los códigos de barras asociados a esa dirección.
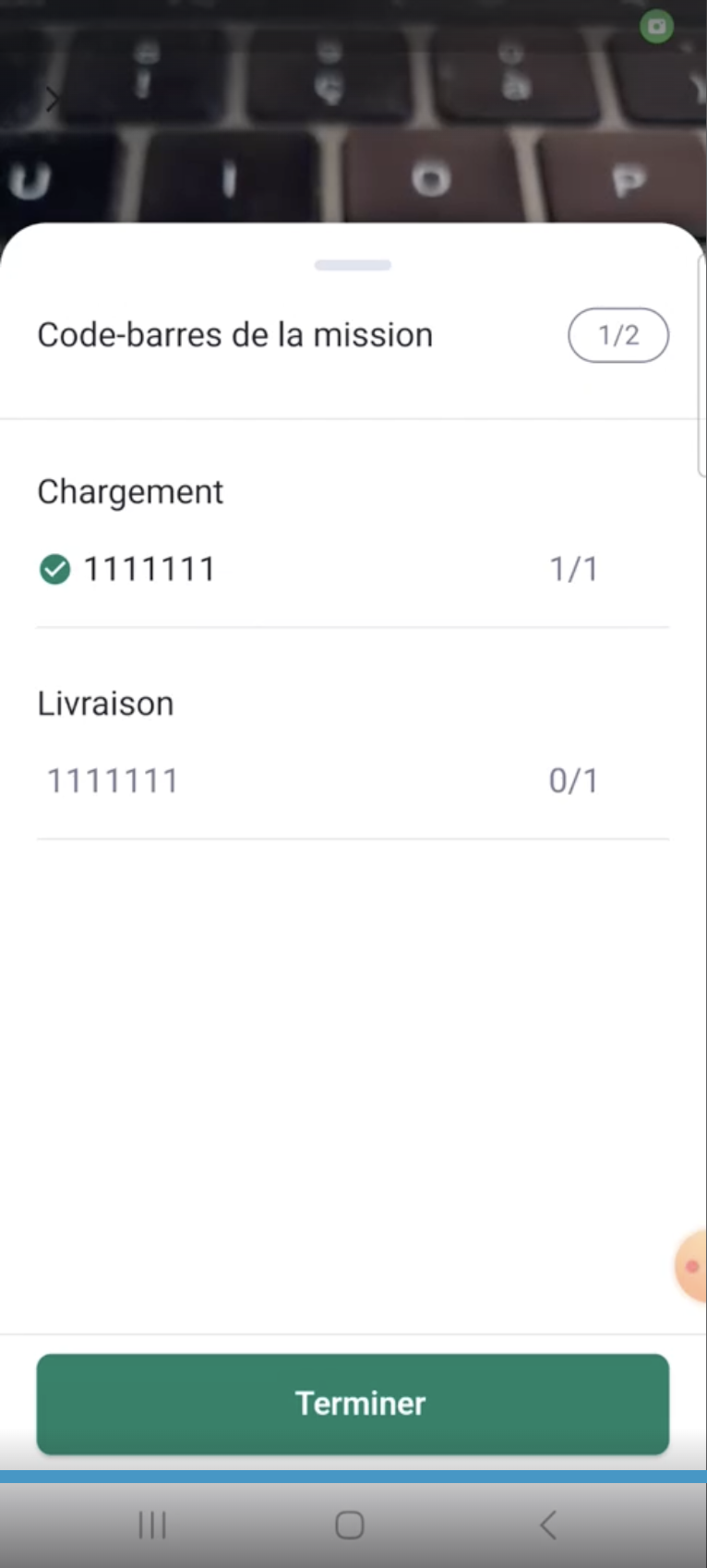
8.2 Escaneo en la entrega
Para validar la entrega:
El conductor debe volver a escanear el código de barras del paquete.
El código de barras escaneado debe coincidir con el escaneado en la carga.
Si el escaneo es correcto:
La misión pasa automáticamente al estado final (ej: "Entregado").
8.3 Entrega grupal
Si varios paquetes están vinculados al mismo destino:
El conductor puede escanear todos los códigos de barras uno tras otro.
Cada misión se actualiza automáticamente.
Todos los estados evolucionan de forma individual.
No hay validación global sin escaneo individual.
Cada paquete sigue siendo independiente en el sistema.
8.4 Casos de excepción en la entrega
Si un paquete no puede ser entregado, por ejemplo, paquete dañado, cliente ausente, rechazo del cliente o problema de transporte, el conductor puede:
Aplicar un estado específico (motivo de fallo)
Añadir un comentario si es necesario
Reportar el problema a su responsable
El estado se actualiza en consecuencia (ej: "Entrega fallida").
9. Gestión de incidentes después de la carga
Si un paquete controlado en la carga presenta un problema durante el transporte:
El conductor puede reportar el incidente desde la misión.
Puede documentar el problema.
El responsable es informado.
El sistema permite entonces:
Cargado → Incidente transporte → Gestión back-office
11. Puntos clave a recordar
1 código de barras = 1 misión = 1 paquete.
Los estados cambian automáticamente después del escaneo.
El escaneo puede reabrirse después del cierre.
Los nuevos paquetes requieren volver a la lista de ruta.
Cada paquete se gestiona de forma individual, incluso en modo mass.
Autoasignación de misiones de otras rutas
Contexto
La recuperación de misiones se refiere a rutas del día o de los días siguientes y pueden ser:
Rutas más tarde en el día
Rutas planificadas en la semana
Rutas aún no planificadas
Los camiones no siempre se llenan a su máxima capacidad, algunos paquetes están planificados en rutas futuras, el depósito no siempre cuenta con un operador para reajustar en tiempo real la asignación de paquetes en Mapo Planner, por eso Mapo Driver ha decidido dar al conductor la posibilidad de optimizar él mismo la carga de su camión.
El objetivo es permitir al conductor:
Escanear un paquete no previsto en su ruta actual
Vincularlo a su ruta en curso
Optimizar la carga de su camión
Todo de manera fluida y trazable.
1. Funcionamiento general
1.1 Escaneo de un paquete fuera de ruta
Cuando el conductor escanea un código de barras, el paquete puede corresponder a:
1 paquete = 1 misión
N paquetes = N misiones
Ningún paquete conocido
Una misión de otra ruta
Una ruta futura planificada
Una ruta futura no planificada
1.2 Detección de pertenencia a otra ruta
Si el paquete pertenece a otra ruta:
Aparece una ventana emergente “Añadir un paquete”.
El conductor puede elegir asociarlo a su ruta.
1.3 Selección de ruta (menú desplegable)
En la lista desplegable, Mapo Driver muestra 3 niveles:
Nombre de la ruta
Nombre de la misión
Fecha planificada de la ruta
2. Validación
Cuando el conductor hace clic en “Añadir el paquete”:
La solicitud se envía a nuestras herramientas de back-office.
El paquete se reasigna a la ruta en curso.
La misión ahora está asociada a su ruta.
El paquete recogido por un conductor A ha sido retirado a un conductor B, o a la ruta original
El panel de seguimiento se actualiza para garantizar la trazabilidad por parte del responsable
3. Gestión de errores
3.1 Ausencia de red móvil
Si el móvil no tiene red:
Después de:
Escaneo
Aparición de la ventana emergente
Clic en “Añadir el paquete”
Entonces:
Se muestra un mensaje de error.
La acción no se realiza.
3.2 Motivo técnico
Si ocurre un error técnico:
Se muestra una pantalla con un aviso:
"Ha ocurrido un error"
No se realiza ninguna reasignación.
4. Visualización tras el añadido
Una vez recuperado el paquete:
Si el conductor vuelve a la pantalla de Recogida Masiva:
Ve el código de barras.
Ve la misión asociada.
El paquete está integrado en su ruta.
Esto garantiza:
Coherencia operativa
Trazabilidad
Visibilidad inmediata
5. Casos particulares
Un código de barras puede:
Corresponder a varias misiones
No corresponder a ninguna misión
En el caso de un código desconocido:
Se muestra un mensaje de error.
No es posible asociarlo.
Geofencing
La solución de geofencing se ha desarrollado para responder a los problemas de olvido o retraso en la actualización del estado final de una misión. Esta falta de actualización del estado final genera malentendidos en el seguimiento por parte del responsable o del cliente final, y provoca frustración.
Configuración
El geofencing es una solución que no está presente por defecto en Mapo Driver, y que se puede activar a petición: en el depósito de salida, en el depósito de llegada, en las misiones o en un contexto de alta densidad de puntos cercanos.
Descripción
1. Definición de Geofencing
El geofencing en Mapo Driver permite automatizar o sugerir cambios de estado según la posición GPS del conductor.
Existen dos modos de funcionamiento:
Aplicación automática del estado final
Ventana emergente sugerida (alerta no bloqueante)
El radio por defecto es de 150 metros, pero puede ajustarse según el caso de uso (zonas urbanas densas, zonas rurales, sitios logísticos específicos, etc.).
La automatización se activa cuando el conductor:
Sale del radio definido
Entra en el radio definido
2. Primer uso
En la primera activación del geofencing:
Mapo Driver muestra un mensaje informativo.
Este mensaje propone al conductor activar la actualización automática de los estados.
Si el usuario confirma (casilla marcada):
La automatización se activa.
El mensaje ya no se mostrará.
Si el usuario no confirma:
El sistema funcionará en modo ventana emergente sugerida.
3. Modo 1 – Aplicación automática del estado
3.1 Disparo
Si el conductor sale del radio de una misión y:
No se ha aplicado ningún estado final
Entonces:
Mapo Driver aplica automáticamente el estado final a la misión.
Ejemplo:
"En curso" → "Entregado"
3.2 Actualización en cascada
Una vez aplicado el estado final:
El estado de la siguiente misión pasa automáticamente a un estado intermedio (ej: "Siguiente" o "En curso").
Esto permite mantener la coherencia del flujo operativo.
3.3 Envío de SMS
Si el envío automático de SMS al cliente está configurado:
El SMS solo se autoriza si los estados están correctamente actualizados.
Esto garantiza la relevancia de la información enviada al cliente.
Sin estado coherente → no se envía SMS.
4. Gestión de zonas densas
En un contexto de alta densidad de puntos de entrega:
La configuración del radio se vuelve estratégica.
Un radio adecuado permite activar varias actualizaciones simultáneas.
Esto permite:
Un ahorro de tiempo significativo
Un tracking más fluido
Mejor precisión en el seguimiento
Así, el sistema puede actualizar varias misiones cuando el conductor sale de una zona compacta.
5. Geofencing aplicado a los depósitos
El geofencing también puede activarse en:
Depósito de salida
Depósito de llegada
Para que esto funcione correctamente:
El depósito debe estar en un estado intermedio (ej: "En curso").
Así:
Entrada al depósito de salida → actualización automática
Salida del depósito de llegada → actualización automática
Caso particular: depósito de salida = depósito de llegada
Si el depósito de salida y el depósito de llegada corresponden a la misma ubicación:
Mapo Driver distingue ambos eventos.
El sistema evita cualquier actualización automática simultánea de ambos estados.
Esto impide un cierre erróneo antes de que se realice una misión.
6. Modo 2 – Popup sugerente (alerta no bloqueante)
Este modo funciona con la misma lógica de detección geográfica que la automatización, pero sin actualización automática.
6.1 Activación
Si el conductor:
Sale del radio de una misión
No ha aplicado un estado final
Entonces:
Aparece una ventana emergente de aviso.
6.2 Funcionamiento de la ventana emergente
La ventana emergente:
Informa al conductor que parece haber olvidado un estado final.
Propone una acción.
Cuando el conductor hace clic en "Ok, lo entendí":
La ventana emergente desaparece.
Es redirigido a la página de detalles de la misión.
Puede actualizar el estado.
No está obligado a hacerlo.
El sistema nunca bloquea al usuario.
6.3 Repetición de la alerta
Cada vez que se olvida un estado final:
La ventana emergente vuelve a aparecer.
No se guarda memoria de un olvido anterior.
7. Condiciones obligatorias para el funcionamiento
La automatización o la sugerencia solo funciona si se cumplen todas las siguientes condiciones:
La geolocalización está activada en los ajustes de Mapo Driver.
El geofencing está activo durante las horas de ruta.
La ruta está en curso (al menos una misión en estado "En curso").
El geofencing solo está activo para las rutas del día.
Mapo Driver ha detectado un cambio de estado previo.
Si alguna de estas condiciones no se cumple:
No se produce ningún disparo automático ni sugerido.
8. Puntos clave a recordar
El radio por defecto es de 150 m.
Es configurable.
Dos modos: automático o sugerido.
No hay bloqueo al usuario.
La coherencia de los estados condiciona los SMS.
Los depósitos se gestionan de forma diferente a las misiones.
El sistema distingue entre depósito de salida y depósito de llegada incluso si la ubicación es la misma.