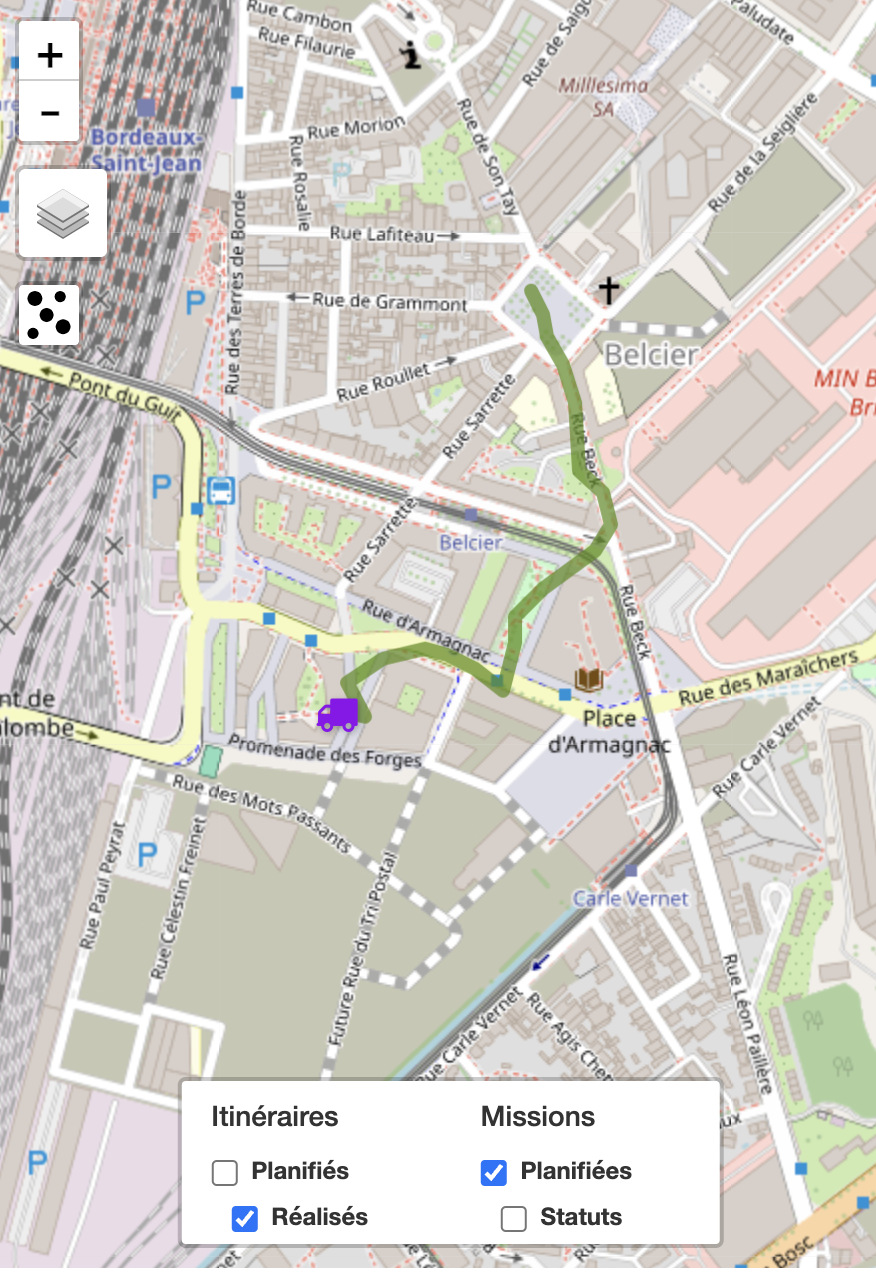
Tracé des missions réalisées
Le planificateur ou responsable de l'utilisateur peut visualiser depuis le tableau de bord de suivi de Mapo Planner, la réalisation réelle au fil des missions de ce dernier.
Il y a plusieurs conditions à la visualisation :
- L'option de "Tracé réalisé" est activée sur le compte utilisé par l'utilisateur,
- Le tracé est établi :
- Si toute la géolocalisation est activée dans l’application mobile
- Autorisation d'utilisation de la localisation
- Autorisation de l'arrière-plan
- Autorisation de la position précise
- Quand l'utilisateur se connecte à Mapo Driver
- Si toute la géolocalisation est activée dans l’application mobile
- Le tracé est arrêté lorsque l'utilisateur se déconnecte de Mapo Driver
Mass pick up & Mass delivery
La solution de mass pick up a été travaillée pour répondre aux problèmes de temps passé, de collecte unitaire, de la faible efficacité au chargement, et enfin du manque de contrôle au chargement, et entre le chargement et la livraison.
Configuration
Le Mass Pick up est une solution qui n'est pas présente par défaut dans Mapo Driver, et qui est activable à la demande.
Celle-ci peut être activée soit sur le chargement de la tournée uniquement, soit sur le chargement et les livraisons.
Partenaire de scan
En complémentarité et pour accélérer le geste métier de scan code barre, Woop a intégré la solution d'un partenaire dans l'application mobile, accélérant l'identification des code barres :
- possibilité de scanner de loin,
- réactivité accélérée de l'identification du colis,
- possibilité de scanner dans un endroit peu éclairé
- et bien d'autres avantages.
L'intégration de ce partenaire s'est réalisée selon deux options :
- la première résulte d'un scan haute performance, adapté pour le chargement et la livraison accélérés;
- et la seconde résulte d'un scan IA à réalité augmentée, adapté pour identifier dans le coffre du camion les colis relatifs à un chargement d'une mission et d'une livraison
Description
1. Principe général du Mass Pickup
Le Mass Pickup permet au chauffeur de scanner l’ensemble des colis de sa tournée en une seule session de chargement.
Chaque scan relie automatiquement un colis à une mission de la tournée et met à jour son statut.
Deux modes de démarrage sont possibles.
2. Démarrage du Mass Pickup
Option 1 – Scan immédiat (mode rapide)
Depuis la tournée, au clic sur l’action Mass Pickup :
L’application ouvre automatiquement la caméra en mode scan code-barres.
L’objectif est d’éviter toute friction et toute perte de temps.
Ce mode est utilisé lorsque le processus ne nécessite pas de validation préalable.
Option 2 – POD avant scan
Il est possible de configurer l’application pour exiger un POD avant le scan.
POD = preuve d’opération.
Il peut inclure :
Signature
Photo
Formulaire
Commentaire
Dans ce cas :
Le chauffeur valide le POD.
Une fois le POD complété, le scan code-barres s’ouvre automatiquement.
Le chargement peut commencer.
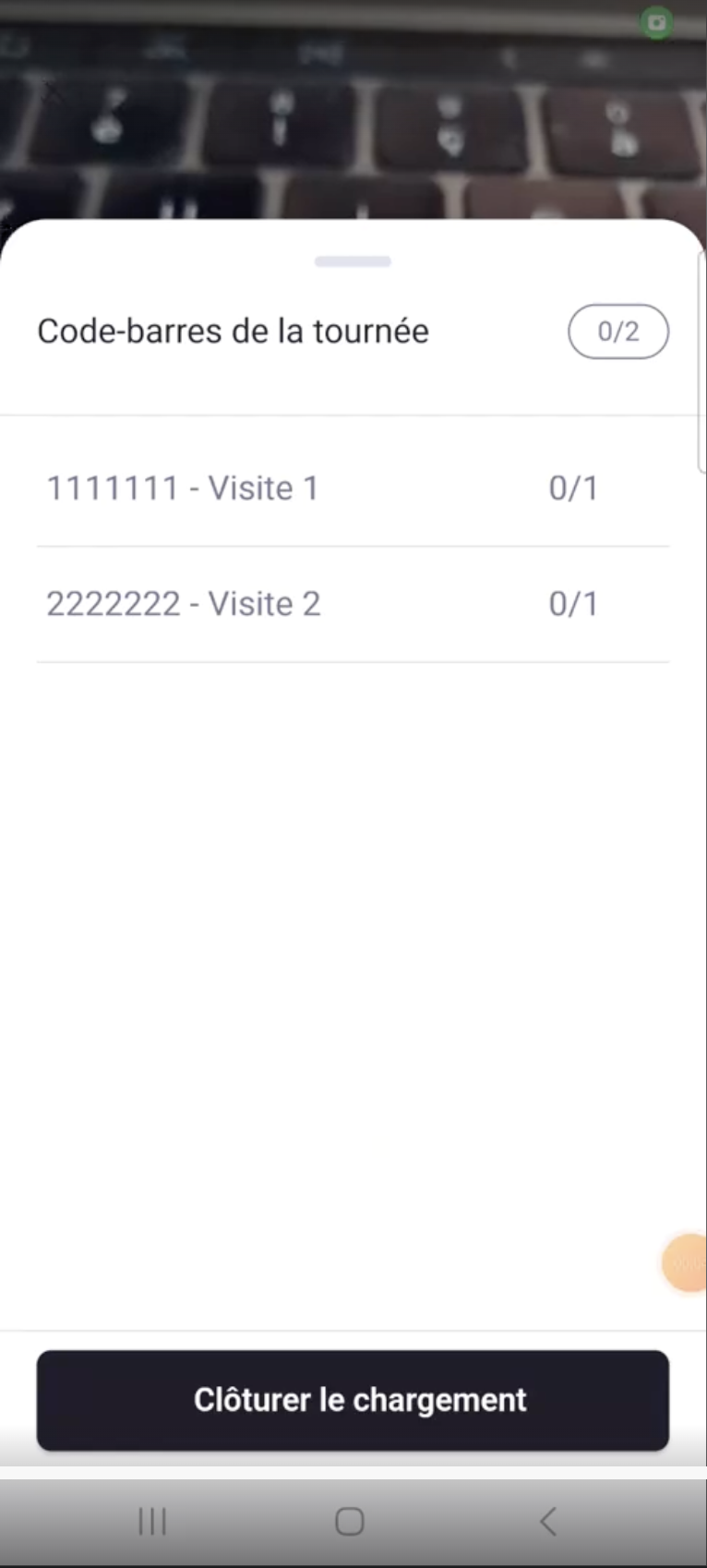
3. Écran de scan – Mass Pickup
Lorsque la caméra est active :
L’utilisateur visualise l’ensemble des codes-barres attendus pour sa tournée.
Chaque code-barres correspond à une livraison (une mission).
Comportement au scan
Lorsqu’un code-barres est scanné :
Il est identifié par le système.
Il est automatiquement associé à la mission correspondante.
La mission est marquée comme scannée au chargement.
Aucune action manuelle de mise à jour de statut n’est nécessaire.
4. Clôture du chargement
Lorsque le chauffeur termine le scan :
Il ferme la session de chargement.
Toutes les missions scannées changent automatiquement de statut.
Exemple :
"A faire" → "Chargé"
La mise à jour est automatique et systématique.
5. Réouverture du scan après clôture
Il est possible que :
De nouveaux colis arrivent après la clôture.
Un colis ait été oublié.
Le chauffeur ait terminé le chargement trop tôt.
Dans ce cas :
Le chauffeur peut revenir dans le module de scan.
Il peut scanner les nouveaux colis.
Les missions correspondantes seront mises à jour automatiquement.
Le système autorise donc la réouverture du Mass Pickup.
6. Gestion des colis non scannés au chargement
Si un colis ne peut pas être scanné :
Le chauffeur peut :
Vérifier à nouveau le colis (erreur de lecture, étiquette abîmée, etc.)
Signaler le colis manquant à son responsable
Le signalement permet un traitement côté back-office.
7. Synchronisation des nouveaux colis
Important :
Les nouveaux colis attribués au chauffeur ne se chargent pas automatiquement dans l’écran de scan.
Si un colis est ajouté avant le scan, pendant le scan, après le scan, le chauffeur doit revenir sur la page “Liste de tournée”. C’est à cet endroit que l’application récupère les nouvelles missions depuis les outils back-office. Sans ce retour à la liste, les nouveaux colis ne seront pas visibles.
8. Mass Delivery – Livraison groupée
Le Mass Delivery reprend le même principe que le Mass Pickup, mais appliqué à la remise client.
8.1 Accès à une destination
Si plusieurs colis appartiennent à une même destination :
Le chauffeur clique sur la destination.
L’application affiche l’ensemble des codes-barres associés à cette adresse.
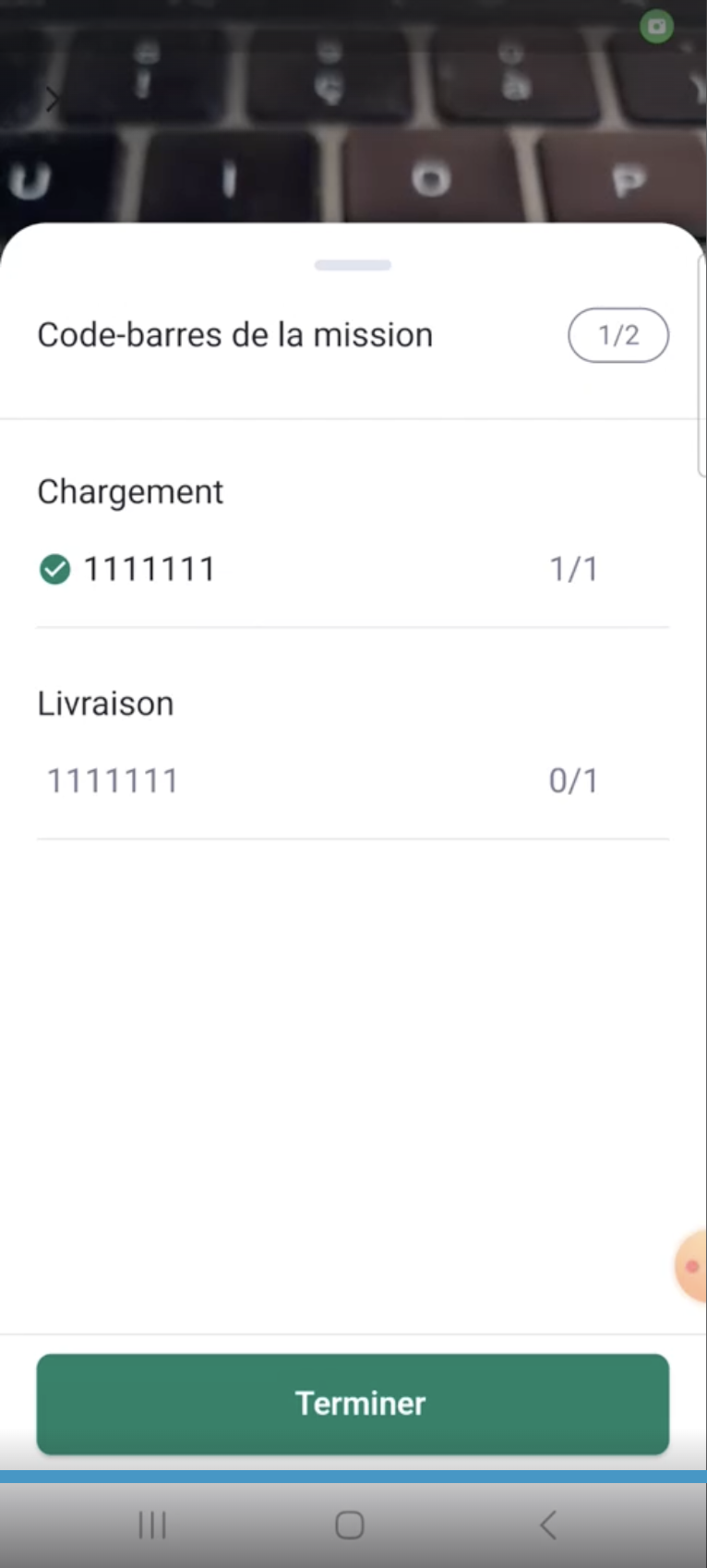
8.2 Scan à la livraison
Pour valider la remise :
Le chauffeur doit rescanner le code-barres du colis.
Le code-barres scanné doit correspondre à celui scanné au chargement.
Si le scan est conforme :
La mission passe automatiquement au statut final (ex : "Livré").
8.3 Livraison groupée
Si plusieurs colis sont liés à la même destination :
Le chauffeur peut scanner tous les codes-barres successivement.
Chaque mission est mise à jour automatiquement.
Tous les statuts évoluent individuellement.
Il n’y a pas de validation globale sans scan individuel.
Chaque colis reste indépendant dans le système.
8.4 Cas d’exception à la livraison
Si un colis ne peut pas être remis, comme par exemple, colis endommagé, client absent, refus client ou problème transport, le chauffeur peut :
Appliquer un statut spécifique (raison d’échec)
Ajouter un commentaire si nécessaire
Signaler le problème à son responsable
Le statut est alors mis à jour en conséquence (ex : "Échec livraison").
9. Gestion des incidents post-chargement
Si un colis contrôlé au chargement rencontre un problème pendant le transport :
Le chauffeur peut signaler l’incident depuis la mission.
Il peut documenter le problème.
Le responsable est informé.
Le système permet donc :
Chargé → Incident transport → Traitement back-office
11. Points clés à retenir
1 code-barres = 1 mission = 1 colis.
Les statuts évoluent automatiquement après scan.
Le scan peut être rouvert après clôture.
Les nouveaux colis nécessitent un retour à la liste de tournée.
Chaque colis est traité individuellement, même en mode mass.
Auto-attribution de missions issues d'autres tournées
Contexte
La récupération de missions concerne des tournées du jour ou des jours suivant et peuvent être :
Des tournées plus tard dans la journée
Des tournées planifiées dans la semaine
Des tournées non encore planifiées
Les camions ne sont pas toujours remplis à pleine capacité, certains colis sont planifiés dans des tournées futures, le dépôt ne dispose pas toujours d’un opérateur pour réajuster en temps réel l’attribution des colis dans Mapo Planner alors Mapo Driver, a décidé de donner la main au chauffeur pour optimiser lui-même le remplissage de son camion.
L'objectif est de permettre au chauffeur de :
Scanner un colis non prévu dans sa tournée actuelle
Le rattacher à sa tournée en cours
Optimiser le remplissage de son camion
Le tout de manière fluide et traçable.
1. Fonctionnement général
1.1 Scan d’un colis hors tournée
Lorsque le chauffeur scanne un code-barres, le colis peut correspondre à :
1 colis = 1 mission
N colis = N missions
Aucun colis connu
Une mission d’une autre tournée
Une tournée future planifiée
Une tournée future non planifiée
1.2 Détection d’appartenance à une autre tournée
Si le colis appartient à une autre tournée :
Une popin “Ajout d’un colis” s’affiche.
Le chauffeur peut choisir de le rattacher à sa tournée.
1.3 Sélection de tournée (menu déroulant)
Dans la liste déroulante proposée, Mapo Driver affiche en 3 niveaux :
Nom de tournée
Nom de mission
Date planifiée de tournée
2. Validation
Lorsque le chauffeur clique sur “Rajouter le colis” :
La demande est envoyée à nos outils back-office.
Le colis est réattribué à la tournée en cours.
La mission est désormais rattachée à sa tournée.
Le colis récupéré par un chauffeur A a été retiré à un chauffeur B, ou à la tournée d'origine
Le dashboard de suivi se met à jour pour garantir la traçabilité par le responsable
3. Gestion des erreurs
3.1 Absence de réseau mobile
Si le mobile n’a pas de réseau :
Après :
Scan
Affichage de la popin
Clic sur “Rajouter le colis”
Alors :
Un message d’erreur est affiché.
L’action n’est pas réalisée.
3.2 Raison technique
Si une erreur technique intervient :
Affichage d’un écran avec toaster :
"Une erreur est survenue"
Aucune réattribution n’est effectuée.
4. Visualisation post-ajout
Une fois le colis récupéré :
Si le chauffeur revient sur l’écran Mass Pickup :
Il voit le code-barres.
Il voit la mission rattachée.
Le colis est intégré à sa tournée.
Cela garantit :
Cohérence opérationnelle
Traçabilité
Visibilité immédiate
5. Cas particuliers
Un code-barres peut :
Correspondre à plusieurs missions
Ne correspondre à aucune mission
Dans le cas d’un code inconnu :
Un message d’erreur est affiché.
Aucun rattachement n’est possible.
Geofencing
La solution de geofencing a été travaillée pour répondre aux problèmes d'oubli ou de retard de mise à jour de statut final sur une mission. Cette non mise à jour de statut final, entraîne des incompréhensions vis-à-vis du suivi du responsable sinon du client final, et génère de la frustration.
Configuration
Le geofencing est une solution qui n'est pas présente par défaut dans Mapo Driver, et qui est activable à la demande : sur le dépôt de départ, sur le dépôt d'arrivée, sur les missions ou dans un contexte de densités de points rapprochés.
Description
1. Définition du Geofencing
Le geofencing dans Mapo Driver permet d’automatiser ou de suggérer des changements de statut en fonction de la position GPS du chauffeur.
Il existe deux modes de fonctionnement :
Application automatique du statut final
Popup suggestive (alerte non bloquante)
Le rayon par défaut est de 150 mètres, mais il peut être ajusté selon les cas d’usage (zones urbaines denses, zones rurales, sites logistiques spécifiques, etc.).
L’automatisation s’active lorsque le chauffeur :
Sort du rayon défini
Entre dans le rayon défini
2. Première utilisation
Lors de la première activation du geofencing :
Mapo Driver affiche un message d’information.
Ce message propose au chauffeur d’activer la mise à jour automatique des statuts.
Si l’utilisateur confirme (case cochée) :
L’automatisation est activée.
Le message ne sera plus affiché.
Si l’utilisateur ne confirme pas :
Le système fonctionnera en mode popup suggestive.
3. Mode 1 – Application automatique du statut
3.1 Déclenchement
Si le chauffeur sort du rayon d’une mission et que :
Aucun statut final n’a été appliqué
Alors :
Mapo Driver applique automatiquement le statut final à la mission.
Exemple :
"En cours" → "Livré"
3.2 Mise à jour en cascade
Une fois le statut final appliqué :
Le statut de la mission suivante passe automatiquement à un statut intermédiaire (ex : "Suivant" ou "En cours").
Cela permet de maintenir la cohérence du flux opérationnel.
3.3 Déclenchement des SMS
Si l’envoi automatique de SMS client est configuré :
Le SMS est autorisé uniquement si les statuts sont correctement mis à jour.
Cela garantit la pertinence de l’information envoyée au client.
Pas de statut cohérent → pas d’envoi SMS.
4. Gestion des zones denses
Dans un contexte de forte densité de points de livraison :
Le paramétrage du rayon devient stratégique.
Un rayon adapté permet de déclencher plusieurs mises à jour simultanées.
Cela permet :
Un gain de temps significatif
Un tracking plus fluide
Une meilleure précision dans le suivi
Le système peut ainsi mettre à jour plusieurs missions lorsque le chauffeur quitte une zone compacte.
5. Geofencing appliqué aux dépôts
Le geofencing peut également être activé sur :
Dépôt de départ
Dépôt d’arrivée
Pour que cela fonctionne correctement :
Le dépôt doit être dans un statut intermédiaire (ex : "En cours").
Ainsi :
Entrée dans le dépôt de départ → mise à jour automatique
Sortie du dépôt d’arrivée → mise à jour automatique
Cas particulier : dépôt départ = dépôt arrivée
Si le dépôt de départ et le dépôt d’arrivée correspondent à la même localisation :
Mapo Driver distingue les deux événements.
Le système évite toute mise à jour simultanée automatique des deux statuts.
Cela empêche une clôture erronée avant même qu’une mission ne soit réalisée.
6. Mode 2 – Popup suggestive (alerte non bloquante)
Ce mode fonctionne sur la même logique de détection géographique que l’automatisation, mais sans mise à jour automatique.
6.1 Déclenchement
Si le chauffeur :
Sort du rayon d’une mission
N’a pas appliqué de statut final
Alors :
Une popup d’attention s’affiche.
6.2 Fonctionnement de la popup
La popup :
Informe le chauffeur qu’un statut final semble avoir été oublié.
Propose une action.
Lorsque le chauffeur clique sur "Ok, j’ai compris" :
La popup disparaît.
Il est redirigé vers la page détaillée de la mission.
Il peut mettre à jour le statut.
Il n’est pas forcé de le faire.
Le système ne bloque jamais l’utilisateur.
6.3 Répétition de l’alerte
À chaque oubli de statut final :
La popup réapparaît.
Il n’y a pas de mémorisation d’un oubli précédent.
7. Conditions obligatoires pour le fonctionnement
L’automatisation ou la suggestion ne fonctionne que si toutes les conditions suivantes sont respectées :
La géolocalisation est activée dans les paramètres Mapo Driver.
Le geofencing est actif pendant les heures de tournée.
La tournée est en cours (au moins une mission en statut "En cours").
Le geofencing est actif uniquement pour les tournées du jour.
Mapo Driver a détecté un changement de statut préalable.
Si l’une de ces conditions n’est pas remplie :
Aucun déclenchement automatique ou suggestif ne se produit.
8. Points clés à retenir
Le rayon par défaut est de 150 m.
Il est paramétrable.
Deux modes : automatique ou suggestif.
Aucun blocage utilisateur.
La cohérence des statuts conditionne les SMS.
Les dépôts sont traités différemment des missions.
Le système distingue dépôt départ et dépôt arrivée même si la localisation est identique.